許多遊戲都會需要碰撞檢測來判斷兩物體的碰撞,但這些演算法通常是較為昂貴的操作,如果無法有效率的選擇檢測目標,很可能會大幅降低執行的速度。(像是之前提到的SAT碰撞檢測)
在之前的”多邊形碰撞檢測”文中,也有提到當檢測物體越來越多時,基本逐一檢測的效率會越來越差,複雜度約為O(n^2),就算排除重複檢測過的物體,只要是逐一檢測的方法就一定會走訪所有物件。
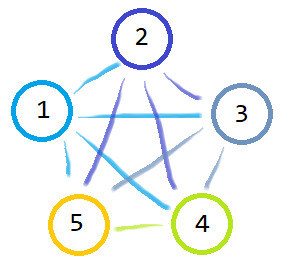
從上圖可以得知直接全部檢測的話是4 x 5 = 20,如果扣掉重複,至少是4 + 3 + 2 + 1 = 10,但真正的問題是,就算1和3距離這麼遠,也照樣會檢查它們,那有沒有方法能解決這種狀況呢?
這就是文章的主要內容,QuadTree。
什麼是QuadTree?
四叉樹(QuadTree)是一種劃分2D區域的樹狀資料結構,類似一般的二元樹,但子節點是4個,而不是2個。
區域的劃分架構類似這樣 :
並限制每個區域能容納的上限,當超過後就將該區域再往下分割4塊,這樣就能夠將每個物體進行區域分類,這樣在檢查的時候就可以鎖定部分區域的物體,從而增加效率。
插入流程:
假設我先設定每個區域只能容納4個物體,只要超過該容量,就要分割該區域。
左圖方形區域已經有4個物體,想再加入第5個時,就必須分割成4個子區域,再將第5顆分類到最近的左上角區域中,如右圖:

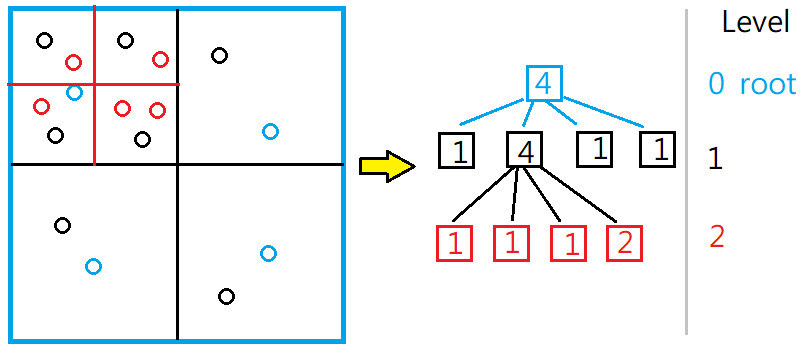
以此類推,當要放入第9顆物體時,發現黑色區域也滿了,所以就再往下分割紅色區域,並放入離該物體最近的右下角區域中,如下圖:

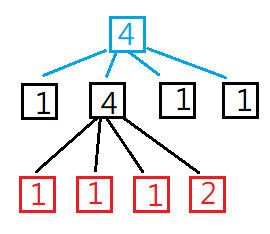
最後,就可以得出這樣的樹狀結構,這就是為什麼會叫做4叉樹的原因,如下圖:
搜尋流程:
給定一搜尋範圍,並逐一排除不可能的區域,最後取得搜尋範圍內的物體。
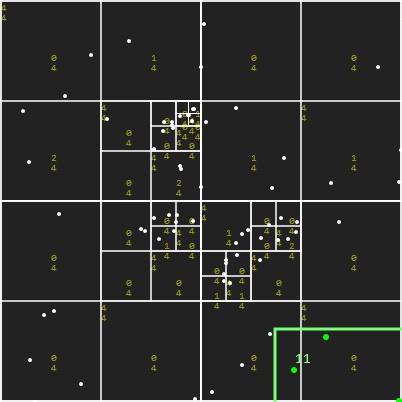
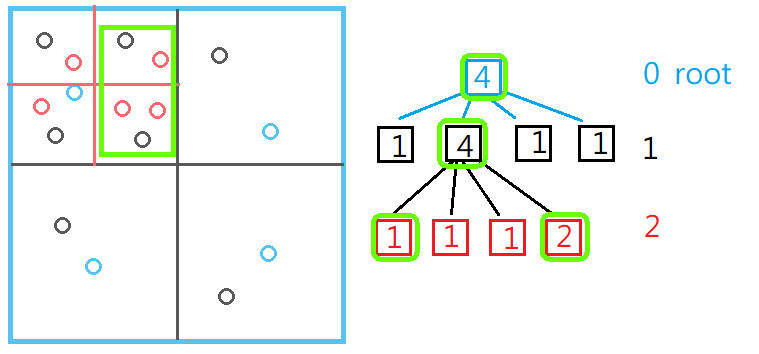
接續前面插入的狀態,假設我要檢測綠色框框內的物體是否發生碰撞,步驟如下 :
- 與藍框區域作碰撞檢測,發現有所交集,檢測藍色區域的物體是否包含在綠框中,發現並沒有。
- 與藍框的黑色子區域作檢測,發現只與左上的區域有所交集,所以排除另外三個區域,並發現有2個物體包含在綠框內。
- 再往下檢察左上黑框的紅色子區域,並排除左上、左下,發現有3個物體在綠框內,紅框沒有子領域,走訪結束。
最後回傳搜尋到的5個物體。

如果是碰撞檢測的應用的話,就是把綠框換成該物體周圍可能發生碰撞的範圍,再來套入搜尋,就能更加簡化碰撞檢測的流程,如下圖 :

假設要檢查有機會與黑色物體碰撞的物體,透過上述的篩選流程,最後只要針對與綠框相交的2個紅色物體,來執行碰撞檢測,以此達成碰撞效率優化。
這就是四叉樹的原理,接著進入實作環節吧。
實作QuadTree – 插入
先整理大致的插入順序:
- 如果該點不屬於A區域,直接結束
- 如果該點屬於A區域,且A區域容量還夠的時候,將該點加入A區域
- 如果A區域容量不夠時,將A區域劃分4個子區域,並將該點加入離它最近的子區域
四個子區域的規劃:

我覺得在巴哈網誌貼上Code成效不佳,所以想看Code的話請直接到我網站觀看。
基本插入範例,滑鼠點擊即可新增物體 : Here .
巴哈不給我做內嵌執行,所以只能開新視窗。
實作QuadTree – 搜尋
搜詢的大致順序 :
- 如果搜尋範圍跟當前領域相交,檢查該領域有多少物體包含在搜尋範圍中,並增加至陣列中
- 當該領域有子區域時,繼續往下檢查有多少物件包含在搜尋範圍內
- 直到所有搜尋範圍內的區域都被檢測過,回傳所有在搜尋範圍內的物體
可以比對一下上面講的搜尋流程,應該會更清楚。
基本搜尋範例,滑鼠點擊新增物體,移動可取得範圍內的物體 : Here .
實際應用:
我將正常的碰撞檢測與QuadTree檢測放在一起做比較,可以清楚的看到,當物體數量到2000時,No QuadTree的檢測方法已經無法負荷,畫面有明顯卡頓。換成QuadTree檢測後,就只掉一點FPS,透過比對,可以明顯看到效能的提升。
每當物體碰撞時變成白色,滑鼠點擊新增100個物體,按下按鈕以切換不同檢測模式,觀察效能的差距 : Here .
完整文章連結:點此前往